


|
Navigation: Library > Iconic Diagrams > Mechanical > Translation > Transmission > Fork |
  
|
Iconic Diagrams\Mechanical\Translation\Transmission
Domains: Continuous. Size: 1-D. Kind: Iconic Diagrams (Translation).
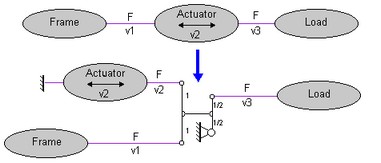
This model is equivalent to the differential model of the Rotation library. It represents a special type of node where the forces are equal and the velocities are added:
p3.v = p1.v + p2.v;
p1.F = p2.F = p3.F;
This model can for example be used for actuators that generate a force difference. With the fork model an equivalent model can be found with the actuator attached to the fixed world:
Ports |
Description |
p1,p2,p3 |
Translation ports. |