


|
Navigation: Editor > Compiling > Integral Form |
  
|
Consider the following first order linear model:
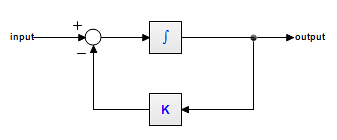
This model can be described by the dynamic equation:
output = int( input - K*output )
Now look at the following model:
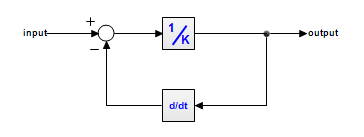
This model can be described by the dynamic equation:
output = ( input - ddt(output) )/K
Note that we can rewrite this equation as:
ddt(output) = input - K*output
or
output = int( input - K*output )
This is the same equation as the previous model! Apparently, both models are the same! Both models can therefore be described by the dynamic equations:
ddt(output) = input - K*output
output = int( input - K*output )
We call the first equation the differential form (no integrals). The second equation is called the integral form (no derivatives). In 20-sim, models can be entered in integral form as well as the differential form.
During compilation, 20-sim will automatically try to rewrite equations into the integral form, since this leads to more efficient simulation. Sometimes an integral form cannot be found. Then algorithms will be applied to solve the differential directly. For example an equation like:
output = ddt(sin(a*time))
will be replaced by the following equation (applying the chain rule and using the known derivative for the sine function):
output = a*cos(a*time)
Sometimes a differential cannot be solved directly. Then only the Backward-Differentiation Methods can be used for simulation.
After compilation simulation code is generated. The equation in integral form:
output = int( input - K*output )
will be written as:
independent state = output
independent rate = input - K*output
and can be handled by all integration methods. The equation in differential form:
ddt(output) = input - K*output
will be written as:
dependent rate = input - K*output
dependent state = output
and can only be handled by the Backward-Differentiation Methods.