


Continuous-Time and Discrete-Time Models |
  
|
In 20-sim you can model continuous-time systems, discrete-time systems and combinations of continuous-time systems and discrete-time systems (hybrid) systems. By default, models in 20-sim are continuous-time, and simulated using continuous-time integration methods. However, the program will automatically identify discrete-time parts in a model and simulate them at a fixed rate.
Continuous-time models describe real-world processes. To simulate a continuous-time model, the model will be calculated many steps per second to get a result that is a good representation of the real-world process. If you model a car suspension system, about 100 steps per second might be sufficient to give a good representation of the behaviour of the car. If you model an electronics circuit, 100.000 steps per second might be required. The default integration method in 20-sim will automatically choose the required steps per second.
Discrete-time models describe processes that run on computers at a fixed rate. To simulated a discrete-time model, you only have to indicate the rate at which the model should be calculated. This is called the sample rate or sample frequency. The sample rate of a discrete-time part can be set in the Simulator.
In 20-sim you can model in continuous-time and discrete-time. Mixed models containing discrete-time parts and continuous time parts are supported as well. The example below shows a continuous time model of a PI-controlled system at the top. At the bottom the same system is shown with a discrete time controller and a continuous-time system. The discrete-time part is indicated by green input and output lines.
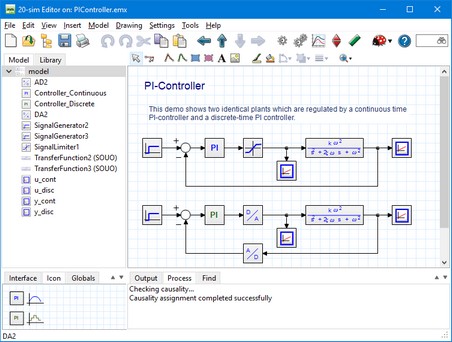
Discrete-time parts of a model are indicated by green inputs and outputs.
Identification of Discrete-Time Parts
In 20-sim every model is continuous-time by default. Discrete-time parts of a model are identified by the occurrence of special functions:
| • | hold |
| • | next |
Normally these functions are hidden in the equations that describe a submodel, but 20-sim will automatically recognize that the input or output of such a function should be discrete-time. If the output is discrete-time it is propagated to the next function, which output is then also "tagged" as discrete-time, and so on until the whole discrete-time part of a model is identified. A discrete time part of a model is indicated by green inputs and outputs (see previous picture).
Continuous-time parts of a model can be connected to discrete-time parts, by using the functions:
| • | sample: The sample function has a continuous-time input and a discrete-time output. |
| • | hold: The hold function has a discrete-time input and continuous-time output. |
You can find these functions for example in the following library models:
| • | DA.emx (Discrete to Analog Converter) |
| • | AD.emx (Analog to Digital Converter) |
| • | Encoder.emx (Optical Encode) |
Forbidden Functions
In a discrete part of a model, certain functions are not allowed, because they are specifically meant for the use in continuous-time models:
| • | ddt |
| • | dly |
| • | int |
If you use a library model that contains such a function in a discrete-time part, an error message will be given.