


|
Navigation: Library > Iconic Diagrams > Mechanical > Rotation > Gears > TimingBelt.emx |
  
|
Iconic Diagrams\Mechanical\Rotation\Gears
Iconic Diagrams\Mechanical\Translation\Transmission
Domains: Continuous. Size: 1-D. Kind: Iconic Diagrams (Rotation/Translation).
This models represents a timing belt, used for linear positioning.
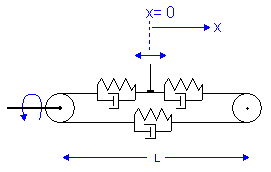
It has a rotating pulley which drives the the belt and clamp. The timing belt is modeled by a series of spring damper elements that convey the rotation of the pulley to a clamp translation. Because the output position is moving, stiffness and damping values are not constant.
The stiffness for a piece of belt can be expressed as:
k = E*A / l
with
E = Modulus of elasticity {N/m2}
A = Belt area {m2}
l = belt length {m}
If the belt is sufficiently pre-tensioned, the stiffness experienced at the clamp can be expressed as the combination of three individual belt parts:
k = E*A/(0.5*l+x) + 1/( 1 / E*A/(0.5*l - x) + 1 / E*A / l )
which can be rewritten to:
k = E*A*( 1/(0.5*l+x) + 1/(1.5*l - x) )
The stiffness approaches infinity as the clamp moves to the driven pulley (x = -l/2) and has a minimum value when the clamp moves to the other pulley (x = 0.5*l). The minimum stiffness is equal to:
k = 2*E*A / l
The belt position is determined by the internal variable x. For x = 0 the clamp is in the middle. When the position crosses the driven pulley, i.e.
x < - belt_length/2
the simulation is stopped: "Error: clamp position larger than belt end!". When the position crosses the other pulley, i.e.
x > belt_length/2
the simulation is also stopped, "Error: clamp position smaller than belt start!".
In this model the minimum stiffness is used, based on an output position at a length L of the driven pulley.
k = 2*E*A / l
In this model a variable stiffness is used equal to:
k = E*A*( 1/(0.5*l+x) + 1/(1.5*l - x) )
Take care not to let the clamp get too close to the driven pulley, because the stiffness will then grow to infinity!
Ports |
Description |
p_rot p_trans |
Rotation port. Translation port. |
Causality |
|
p_rot notequal p_trans |
|
Parameters |
|
radius d E A l |
pinion gear pitch radius [m] damping N.s/m] Modulus of elasticity [N/m2] A = Belt area [m2] belt length [m] |
Variables |
|
x |
clamp position, abs(x) < belt length/2 |
Initial values |
|
x_initial |
Initial clamp position, abs(x_initial) < belt length/2 |