


|
Navigation: Library > Iconic Diagrams > Hydraulics > Motors > variabledisplacementmotor-leakage |
  
|
Iconic Diagrams\Hydraulics\Pumps
Domains: Continuous. Size: 1-D. Kind: Iconic Diagrams (Hydraulics).
Description
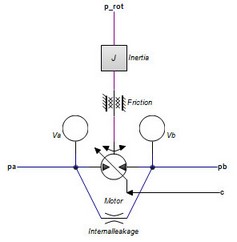
This model describes an motor with internal leakage and an axial speed that is proportional to input flow rate:
pa.phi = pb.phi = i * p_rot.omega;
i = D / (2*pi);
The actual flows at the inlet and outlet port may be slightly different because of the flow into the lumped volumes and the leakage flows. The leakage flows are modeled by laminar resistances. The torque is equal to:
p.T = i*(pa.p - pb.p);
The displacement is controllable by the input signal c. For a positive rotation of the driving axis the flow is:
|
c >= 1 c = 0 c <= -1 |
maximum flow from port 1 to port 2 zero flow maximum flow from port 2 to port 1 |
If the port pressure is smaller than the vapour pressure (p < p_vapour), the flow is zero.
Ports |
Description |
pa pb p_rot |
inlet port (hydraulic) outlet port (hydraulic) axis (rotation) |
Causality |
|
preferred pressure out pa preferred pressure out pa preferred angular velocity out p_rot |
|
Inputs |
|
c |
relative displacement |
Parameters |
|
D J d_m |
Displacement per revolution [m3] Rotational inertia [kg.m2] Viscous (rotational) friction [N.m.s/rad] |
p_static |
start pressure, acts as Coulomb friction, set to 2% of max pressure if unknown [Pa] |
G_int V |
Conductance of laminar resistance [m3/s.Pa] Dead volume of the pump at each port [m3] |