


|
Navigation: Library > Iconic Diagrams > Mechanical > Rotation > Components > Unbalance |
  
|
Iconic Diagrams\Mechanical\Rotation\Components
Domains: Continuous. Size: 1-D. Kind: Iconic Diagrams (Rotation).
This model represents an unbalanced mass with an offset r to the axis of rotation and a starting angle phi_initial.
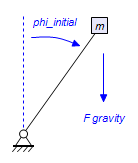
The mass will act as an inertia J with a gravity induced disturbance torque:
J = r^2 * m;
alpha = (p.T + m*r*g_n*sin(phi))/ J;
p.omega = int (alpha);
phi = int (p.omega, phi_initial);
The element has a preferred angular velocity out causality. The corresponding constitutive equations then contain an integration. The element can also have the non-preferred torque out causality. The constitutive equations then contain a derivation. The model has only one rotation port p defined. Because any number of connections can be made, successive ports are named p1, p2, p3 etc. 20-sim will automatically create equations such that the resulting torque p.T is equal to the sum of the torques of all connected ports p1 .. pn and that the angular velocities of all connected ports is equal to p.omega.
p.T = sum(p1.T, p2.T, ....)
p.omega = p1.omega = p2.omega = ....
Ports |
Description |
p[any] |
Any number of connections can be made (Rotation). |
Causality |
|
preferred angular velocity out |
An torque out causality results in a derivative constitutive equation. |
Variables |
|
J phi alpha |
moment of inertia [kgm^2] angle [rad] angular acceleration [rad/s^2] |
Parameters |
|
m r
|
mass [kg] distance of mass from center line of rotation [m] |
Initial Values |
|
p.omega_initial phi_initial |
The initial velocity of the inertia [rad/s]. The starting angle of the mass [rad]. |