


|
Navigation: Library > Signal > Control > PID Control > Continuous > pd |
  
|
Signal\Control\PID Control\Continuous
Domains: Continuous, Discrete Size: 1-D. Kind: Block Diagrams.
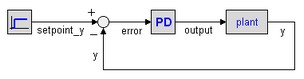
This is a PD controller in series form. The transfer function of an ideal PD-controller is:
![]()
with the input of the controller equal to the error and the output of the controller used as the plant input:
Inputs |
Description |
error |
Input signal: plant-output minus set point. |
Outputs |
|
output |
Output signal: input for the plant. |
Parameters |
|
kp tauD beta |
Proportional gain. Derivative gain (tauD <> 0). Tameness constant (0 < beta << 1). |
Initial Values |
|
state_initial |
output(0) = state_initial - kp*error(0)*/beta |