


|
Navigation: Toolboxes > Control Toolbox > Filter Editor > Controllers > PID2-Controller |
  
|
The PID-2 Controller consists of an integrator and differentiator with proportional gain. It resembles a serial PID Controller, but has different input parameters.
| • | Gain Kp: The controller gain Kp determines the frequency gain of the controller in the pass band (where integration and differentiation are of no interest). |
| • | Length Li: The length Li determines the frequency at which integration starts, that is fi / Li in Hz. A decrease of this frequency corresponds to a more pure integration behavior. |
| • | Length Ld: The length Ld determines the frequency at which differentiation stops, that is fd * Ld in Hz. An increase of this frequency corresponds to a more pure differentiation behavior, reducing the tameness of the controller. |
| • | Frequency fi: The integration behavior of the controller stops at frequency fi in Hz. |
| • | Frequency fd: The differentiation behavior of the controller starts at frequency fd in Hz. |
Transfer function of the controller:
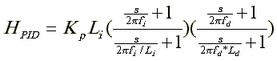
that equals
