


rackpiniongear |
  
|
Iconic Diagrams\Mechanical\Rotation\Gears
Iconic Diagrams\Mechanical\Translation\Transmission
FixedPinion
FixedRack
Domains: Continuous. Size: 1-D. Kind: Iconic Diagrams (Rotation/Translation).
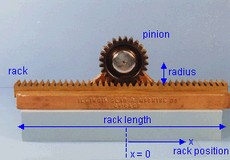
This models represents a rack and pinion gear. The connection to the pinion gear is through the rotation port p_rot. The connection to the rack is through the translation port p_trans. The model is ideal, i.e. there is no compliance nor inertia nor backlash.
In this model the pinion bearing is connected to the fixed world and the rack is free to move. This in contrary to the model FixedRackPinionGear where the pinion bearing is free to move and the rack is connected to the fixed world.
The causality of this model is always mixed: torque out & velocity out or angular velocity out & force out:
p_rot.T = radius * p_trans.F
p_trans.v = radius * p_rot.omega
or:
p_trans.F = 1/radius * p_rot.T
p_rot.omega = 1/radius * p_trans.v
The rack position is determined by the internal variable x. For x = 0, the pinion gear is at the middle of the rack. When the pinion crosses the end of the rack, i.e.
abs(x) > rack_length/2
a warning is given, "WARNING: rack length has been exceeded at the rack and pinion gear!", and the simulation is stopped.
Ports |
Description |
p_rot p_trans |
Rotation port. Translation port. |
Causality |
|
p_rot notequal p_trans |
|
Parameters |
|
radius rack_length |
pinion gear pitch radius [m] rack length [m] |
Variables |
|
x |
Internal variable which denotes the rack position, abs(x) < rack_length/2 else simulation halted. |
Initial values |
|
x_initial |
Initial rack position, abs(x_initial) < rack_length/2 |
This models represents a fixed rack and pinion gear. The connection to the pinion gear is through the rotation port p_rot. The connection to the rack is through the translation port p_trans. The model is ideal, i.e. there is no compliance nor inertia nor backlash.
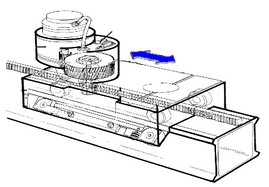
In this model the pinion bearing is free to move and the rack is connected to the fixed world. This in contrary to the model RackPinionGear where the pinion bearing is connected to the fixed world and the rack is free to move.
The causality of this model is always mixed: torque out & velocity out or angular velocity out & force out:
p_rot.T = radius * p_trans.F
p_trans.v = radius * p_rot.omega
or:
p_trans.F = 1/radius * p_rot.T
p_rot.omega = 1/radius * p_trans.v
The rack position is determined by the internal variable x. For x = 0 the pinion gear is at the middle of the rack. When the pinion crosses the end of the rack, i.e.
abs(x) > rack_length/2
a warning is given, "WARNING: rack length has been exceeded at the rack and pinion gear!", and the simulation is stopped.
Ports |
Description |
p_rot p_trans |
Rotation port. Translation port. |
Causality |
|
p_rot notequal p_trans |
|
Parameters |
|
radius rack_length |
pinion gear pitch radius [m] rack length [m] |
Variables |
|
x |
Internal variable which denotes the rack position, abs(x) < rack_length/2 else simulation halted. |
Initial values |
|
x_initial |
Initial rack position, abs(x_initial) < rack_length/2 |