


|
Navigation: Toolboxes > 3D Mechanics Toolbox > Library > Sensors |
  
|
Sensors are components that indicate the position or velocity of bodies as output signals.
Sensors have to be connected with bodies, just like joints.
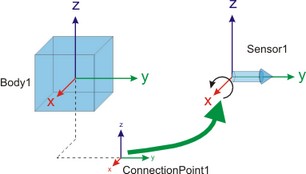
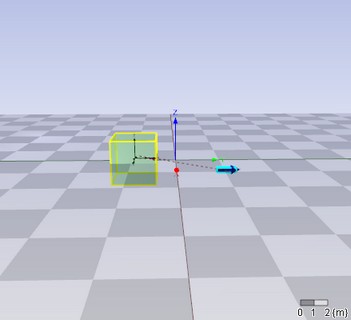
The position of the sensor is indicated by its connection point. The connection point is shown automatically when you make a connection between a body and a sensor. First change to Connection mode (![]() ), then click the body and then click the sensor.
), then click the body and then click the sensor.
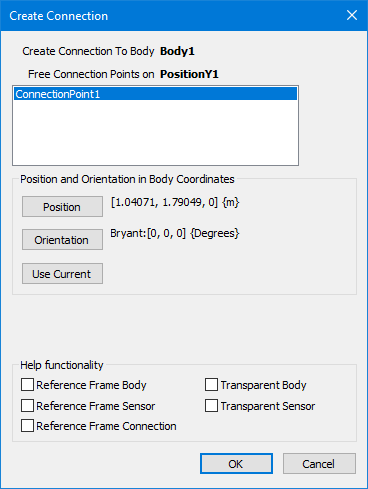
The Create Connection dialog will pop to ask you for the location of the connection point. In the connection dialog you can set the offset (both the position as well as rotation) from the body reference frame to the connection point.
Various sensor types are available in the library.
|
sensor |
output signal |
|
Position-X |
A signal with the x-position of the body. |
|
Position-Y |
A signal with the y-position of the body. |
|
Position-Z |
A signal with the z-position of the body. |
|
Position (3x1) |
A signal (size 3) with the x-, y- and z-position of the body. |
|
H-matrix (4x4) |
A 4x4 signal with the H-matrix. |
|
Rotation (3x3) |
A 3x3 signal with the rotation-matrix. |
|
sensor |
output signal |
|
Velocity-X |
A signal with the x-velocity of the body. |
|
Velocity-Y |
A signal with the y-velocity of the body. |
|
Velocity-Z |
A signal with the z-velocity of the body. |
|
Velocity (3x1) |
A signal (size 3) with the x-, y- and z-velocity of the body. |
|
Omega-X |
A signal with the rotational velocity in x-direction of the body. |
|
Omega-Y |
A signal with the rotational velocity in y-direction of the body. |
|
Omega-Z |
A signal with the rotational velocity in z-direction of the body. |
|
Omega (3x1) |
A signal (size 3) with all three rotational velocities. |
|
sensor |
output signal |
|
Acceleration-X |
A signal with the x-acceleration of the body. |
|
Acceleration-Y |
A signal with the y-acceleration of the body. |
|
Acceleration-Z |
A signal with the z-acceleration of the body. |
|
Acceleration (3x1) |
A signal (size 3) with the x-, y- and z-acceleration of the body. |
|
Rotational Acceleration-X |
A signal with the rotational acceleration in x-direction of the body. |
|
Rotational Acceleration-Y |
A signal with the rotational acceleration in y-direction of the body. |
|
Rotational Acceleration-Z |
A signal with the rotational acceleration in z-direction of the body. |
|
Rotational Acceleration (3x1) |
A signal (size 3) with all three rotational accelerations. |
This yields the Jacobian Matrix of the connected mass.