
Controller Design
Controller Design helps you to design control systems in 20-sim. It contains various tools that can help you in developing controllers for machines like the Controller Design Editor, the Filter Editor and The Neural Network Editors. This editor is a specialized tool for the design of feedback control systems. A feedback structure of subsystems is presented with a linear plant, controller, measurement and pre-filter. Also the open-loop and closed-loop gains and the sensitivities are available.d/lag, or notch filters.
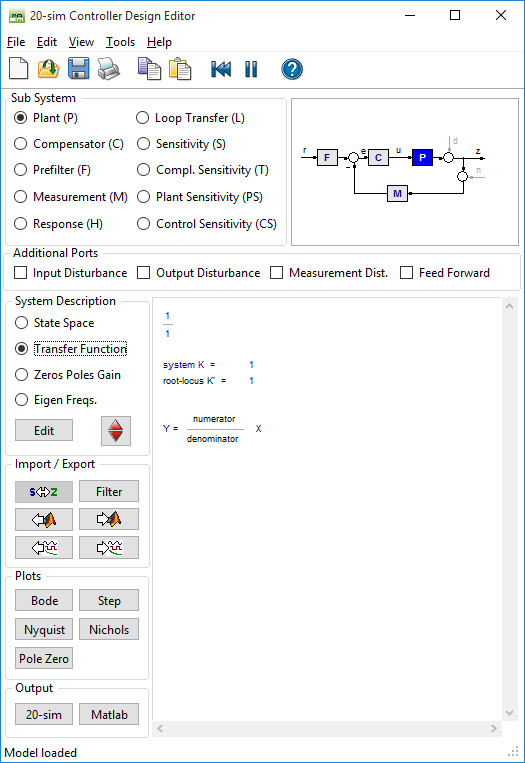
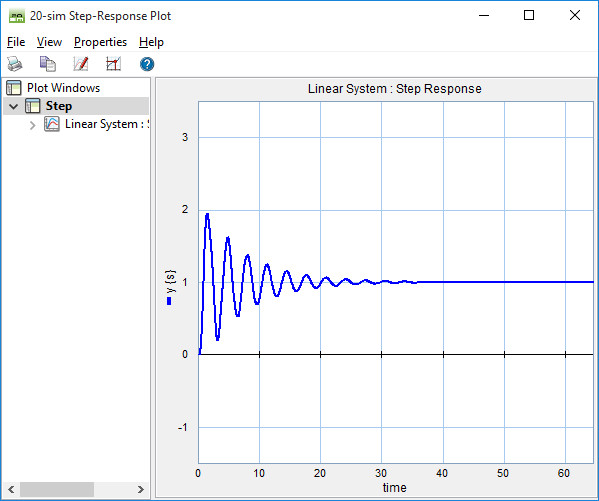
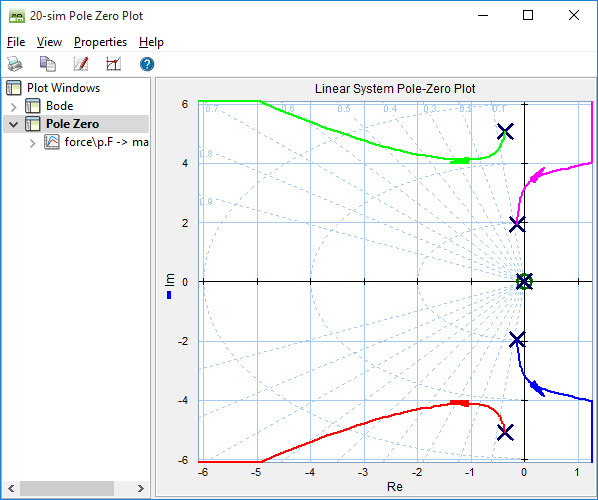
You can edit your controller as an ABCD State Space system, a Transfer Function or in a Zero Pole Gain form. Changes in one of the subsystems directly update all open plots and dialogs. For instance, adapting the controller gain immediately changes poles and zeros of the closed-loop system and the overall step response. The integration within 20-sim and linear system exchange with MATLAB makes this editor a powerful tool for designing feedback control systems!
Filter Editor
With the Filter editor you can create your own linear filters according to your specifications. Available filters are Bessel, Butterworth and ChebyChev filters where you can specify the order and characteristic frequencies. A choice can also be made from PID, lead/lag, or notch filters.
Neural Network Editors
Controller Design supports two well-known networks: Adaptive B-Spline Networks and Multi-Layer Perceptron Networks. These neural networks must be trained by repeatedly presenting examples to the network. Each example includes both inputs and desired outputs. Based on the error between desired outputs and the real network output, the neural network adapts the weight of each neuron according to a user-defined learning rate. If the response is accurate enough, you can save the weights of the neurons, to use the neural network in your controller. An unlimited number of neurons may be used.