
3D Mechanics
3D Mechanics help you to build 3D mechanical systems quickly in 20-sim. You can create multi-body systems by dragging bodies in a 3D workspace. The representations of each body can be changed to a sphere, block, cylinder etc. Furthermore, colors can be changed and descriptions can be added. The size and shape of a body are merely for representation, a body is fully characterized by its inertia coefficients and mass.
Joints
Bodies are interconnected by the use of joints. Several joints are present in the library, divided in two groups, rotational joints and translational joints. These joints can also be drag and dropped on the workspace. Constraints can be added to create closed loop systems like four bar mechanisms or Stewart platforms.
Interface
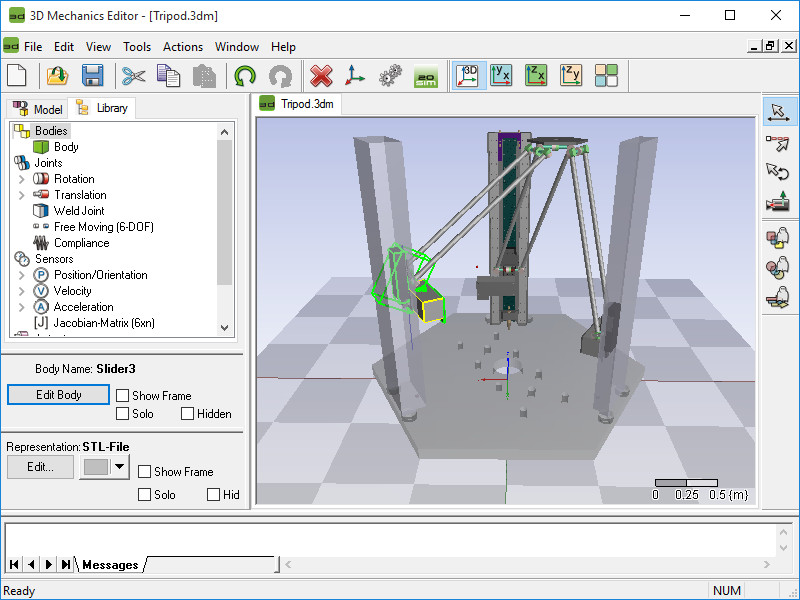
The user interface has 4 different modes in which you can select, connect, translate and rotate bodies and joints. Much effort is done to keep the graphical user interface as natural as possible. Multiple views are supported. Besides the 3D environment, you can see 2D intersections in the xy xz, and yz plane.
Models
The 3D Mechanics Editor can generate a 20-sim model from your 3D model. This 20-sim model comprises all dynamics and kinematics of the model. Forces can be applied to the joints or on to each body directly. You can also couple springs and dampers from the mechanics library in 20-sim, to the joints, because the whole model is port-based. Gravity can be set as an external force. Eventually, the dynamic response of the complete model can be shown by the 3D Animation feature.