Snap feedforward is a form of control that takes into account the flexibility in a system. Adrian Rankers of the Mechatronics Academy asked me if this type of control could be demonstrated in a 20-sim model and applied on the Torsion Bar setup for one of his training courses.
A fine introduction on snap feedforward is given in the paper of Boerlage. It quickly gave me the impression: “This is never going to work! This is fine for ultra-low friction precision engineering machines but will never work on an ordinary setup. And if it works, it will be too difficult for ordinary engineers to understand!”
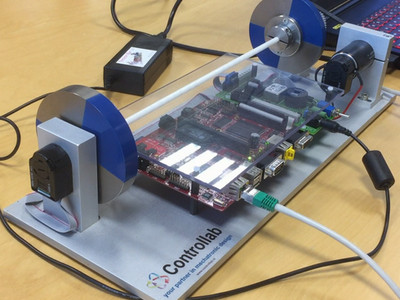
But if something will not work, I always want to know why, so I started to build a model in 20-sim and implemented it onto the Torsion Bar. In the video below, you see the standard PID controller with acceleration feedforward. You must know that the Torsion Bar is deliberately made very flexible to show students visually what resonance is. It is therefore no surprise that the load disk shows large vibrations.
Then I added snap feedforward and to my big surprise the controller works very well. Almost no vibration visible! I mailed the model to Adrian and got the following reply: “It is always amazing when you see theory working in practice. Didn’t expected it to work this well on a teaching setup and deliver such a convincing demo!”.
If you want to understand the finer details of snap feedforward please click on the links below to get a white paper on snap feed forward, download 20-sim and try out some models.